Low-cost gantry robot
Description
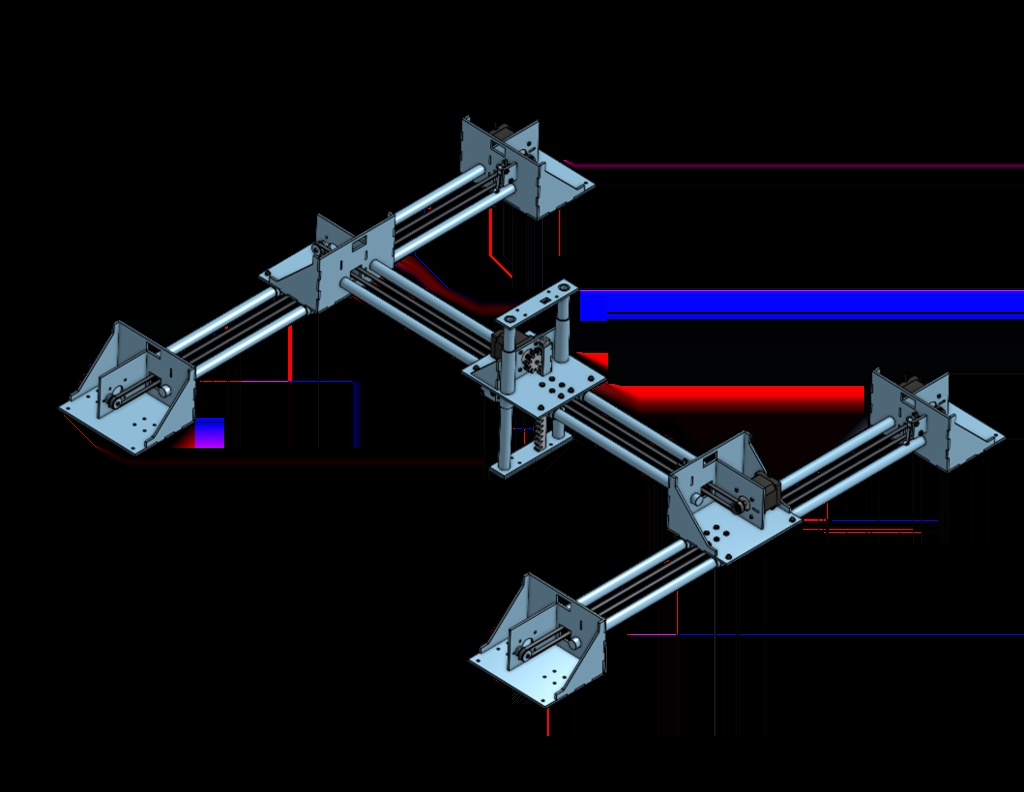
This gantry robot was designed for my bachelor thesis in Industrial Engineering at OST – Eastern Switzerland University of Applied Sciences.The goal was to make a modular, low-cost gantry robot that used only easily obtainable parts. This robot has a working area of around 520mm x 520mm x 100mm.
Comments (0)