All-in-one robotic gripper
Description
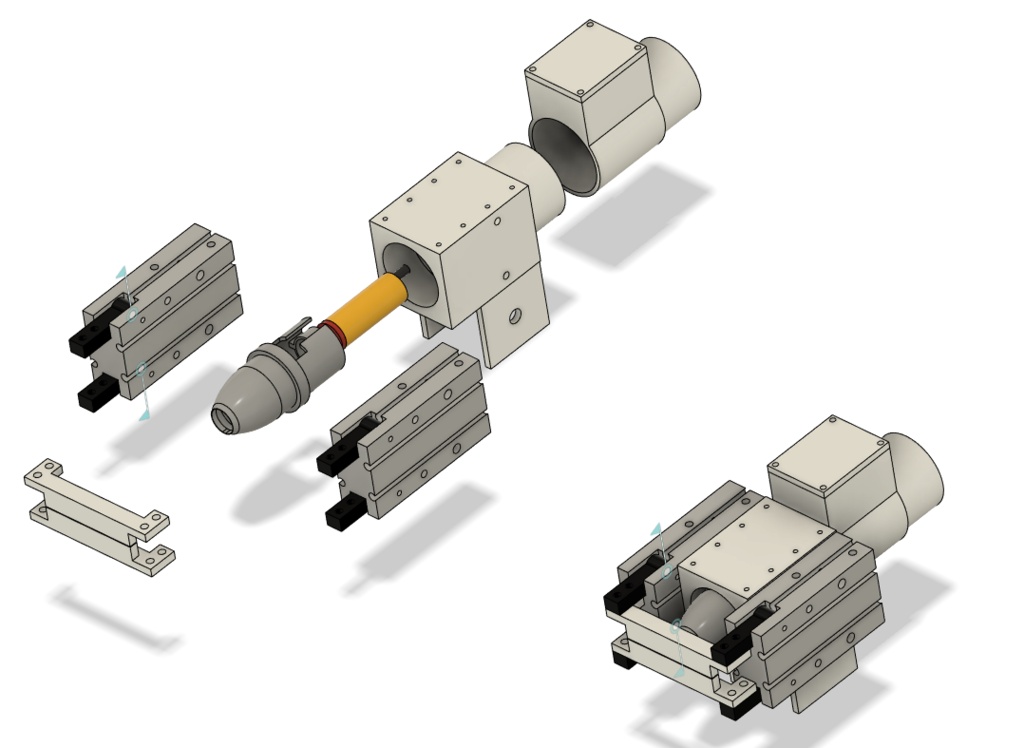
three years ago, I started a project to design a machine that would automate some production processes for my work.A basic component of the machine was a gripper that had to be able to vacuum, detect the distance to objects, and, of course, grab them.I couldn't find anything on the market, so I built it: I designed a first prototype, then a second one, and then the final version, which is still operating today.
Comments (0)