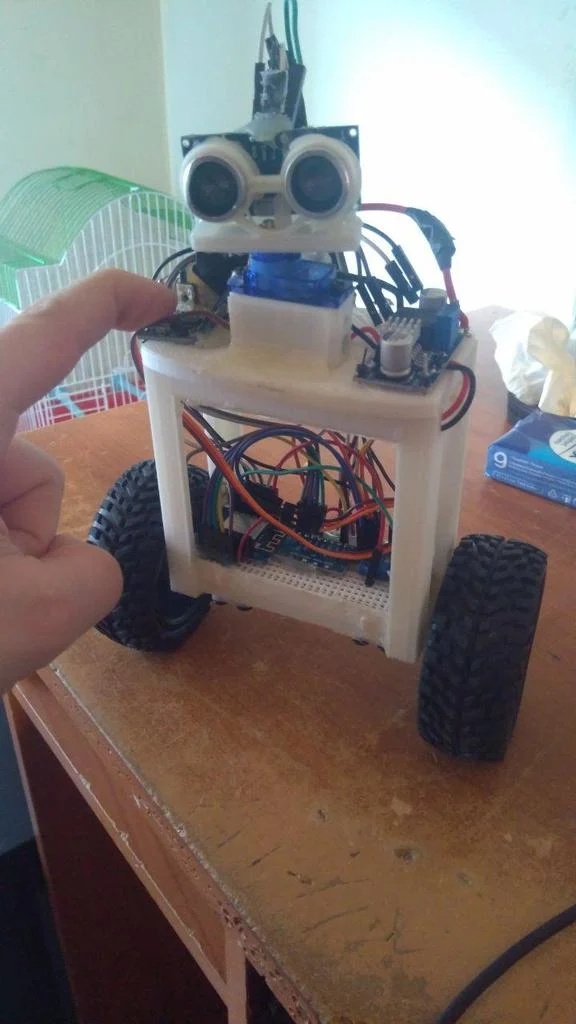
ESP8266 Self Balancing Robot
Description
This is my self balancing robot based on ESP8266, with an obstacle avoidance and remote control features, the entire code is written using arduino, also it has a responsive single web page where you can configure all needed parameters and control the robot remotely. The code and schematic can be found here https://github.com/Dave4675/Inverted-PendulumOTA is used so you can upload the firmware without connecting the usb cable https://arduino-esp8266.
Comments (0)