Knee or mecanic elbow (Compact model)
Description
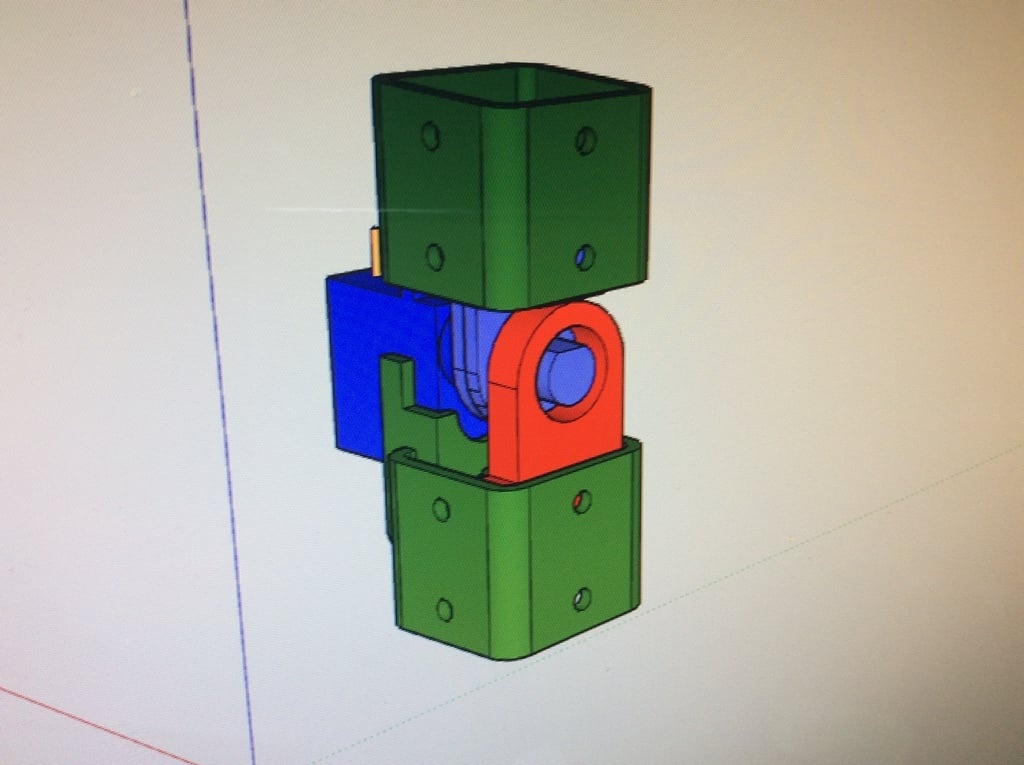
The overall project is to make a robot about 75cm tall. To begin, I identified 2 types of movement for all joints (other than eyes and hands). This part of the project is for joints such as compact model of elbows and knees.
Comments (0)