Robot Leg Assembly
Description
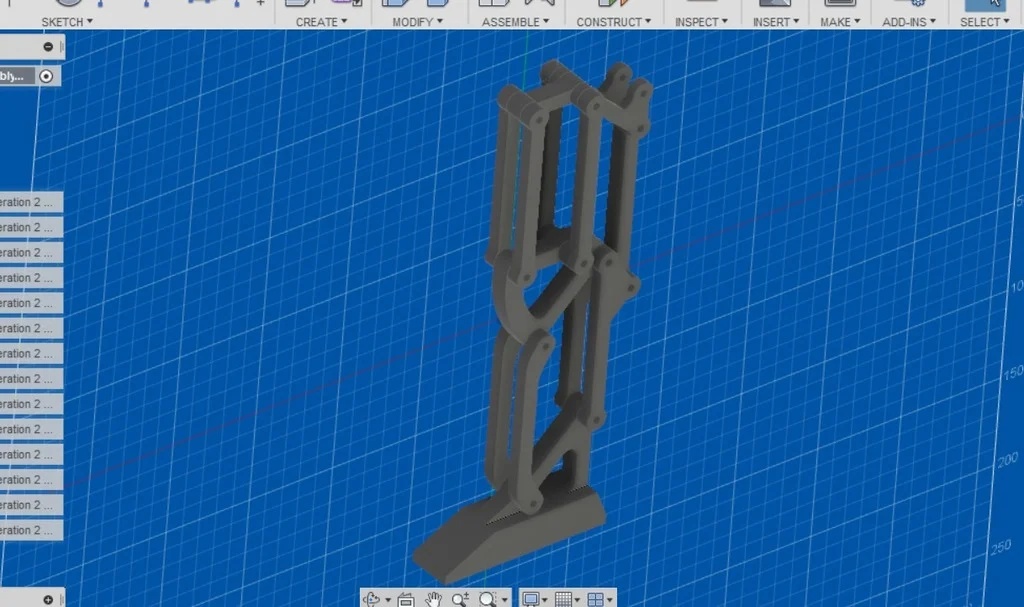
A leg design for walking robots. Motion is controlled by 3 connection points at the hip. The hip section and the rest of the robot design will be uploaded when available.
Comments (0)