Horizontal Travel Robot Arm
Description
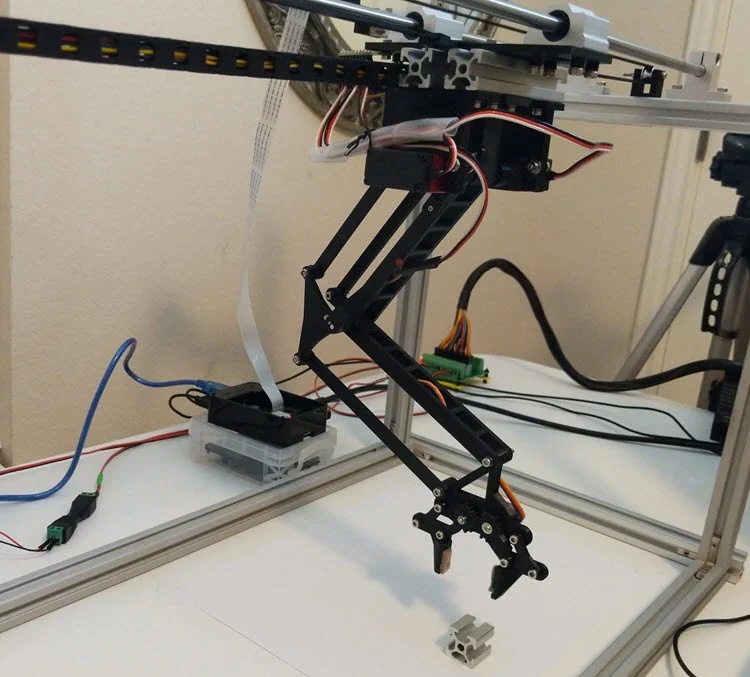
My objective was to create an open design robot that could deliver practical movement of objects for lightweight use cases.The objective of this design, is to enable you to very quickly build a robot that can move things around. I have effectively tested this to 1m and it is extremely reliable for light objects.
Comments (0)