Antrophomorfic Arm 4DOF
Description
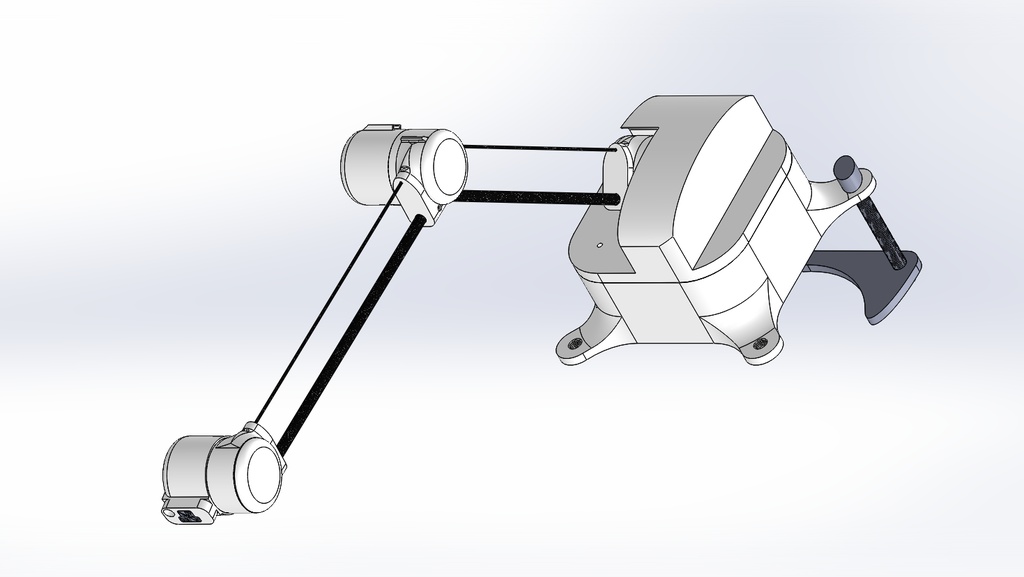
This work, in collaboration with the Laboratory of Robotics (LAR), the Institute of Biomedical Engineering (IEB), and the Laboratory of Integrated Circuits at UFSC (LCI), presents the development of an anthropomorphic arm with four degrees of freedom designed to simulate the movement of a human arm. The work encompasses the development of the kinematic model, simulation, and structural optimization of components, prototype construction through 3D printing, and the results of tests conducted with the robot. The goal is to develop a robot capable of replicating common object-grasping movements, applying human tactile sensing technologies to upper limb prostheses.
Comments (0)