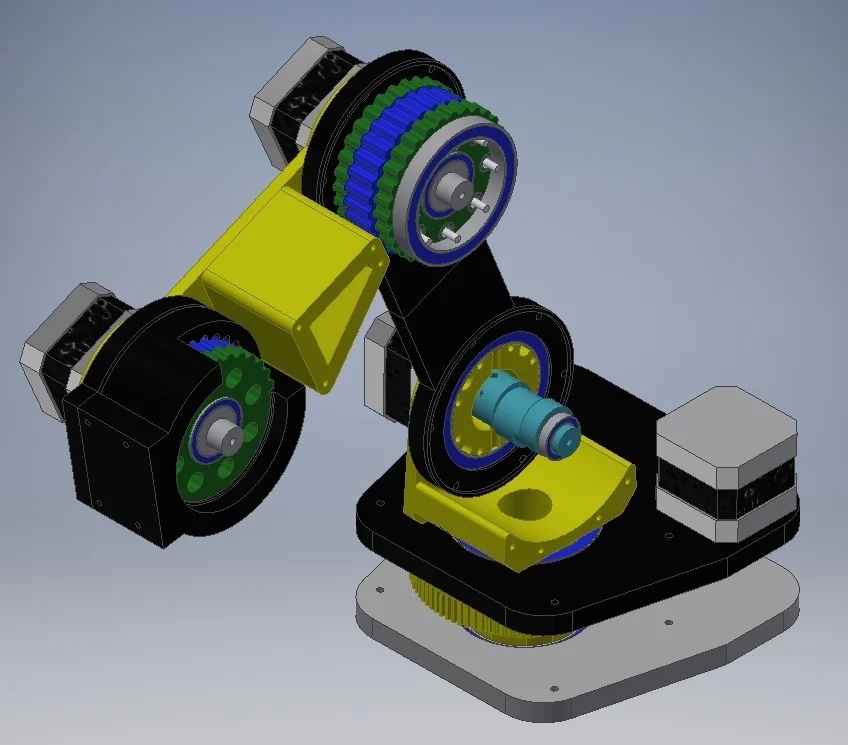
Triple Cycloidal Robot Arm Proto-1
Description
Still a work in progress. Nothing is finalhttps://hackaday.io/project/166133-triple-cycloidal-robot-armBearings 6809RS (big ones for the joints) 2 per joint6704-2RS (med for the eccentric cam) 6 per joint6701-2RS (med for the end of the eccentric cam) 1 per jointMR85-2RS (for the internal pins) 24 per joint)bearing supplier in Australia plaig.
Comments (0)