Line Following Robot
Description
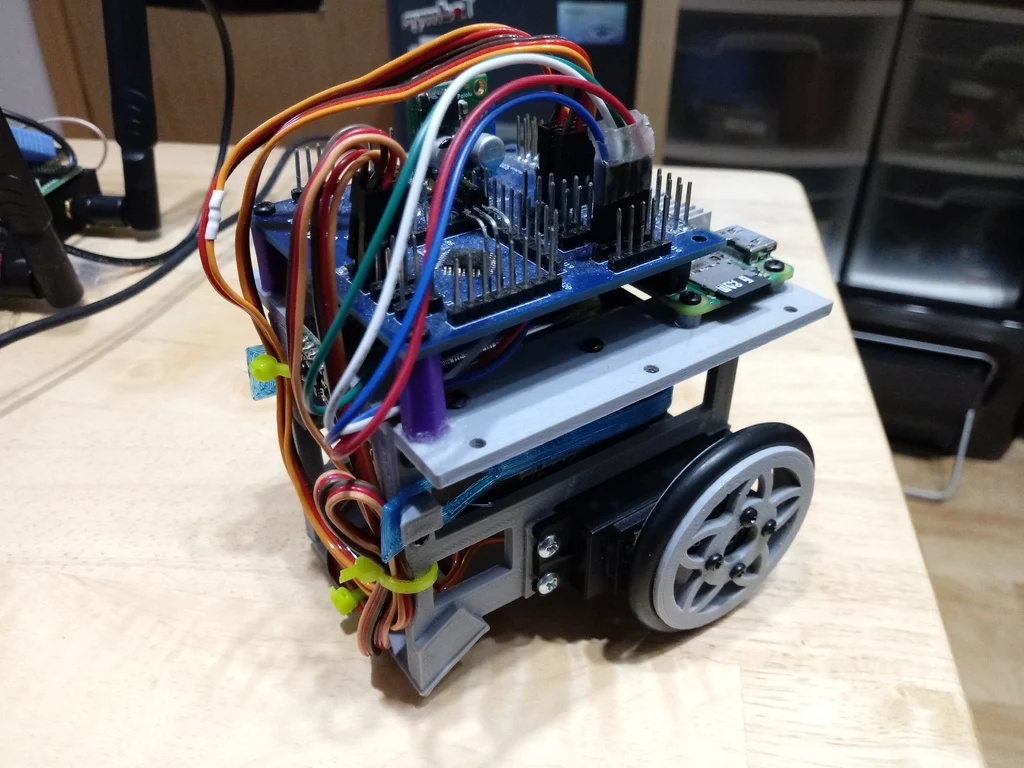
This is a line following robot I designed for the Zebra Explorers post. It's based off the same chassis as my mini Sumo robot. It has the following features:Controlled by a Raspberry Pi ZeroWTwo analog reflectence sensorsLaser TOF distance sensorAVR micro for power management and analog/IR inputUses Python 3 for programming, and c for the driver libs.
Comments (0)