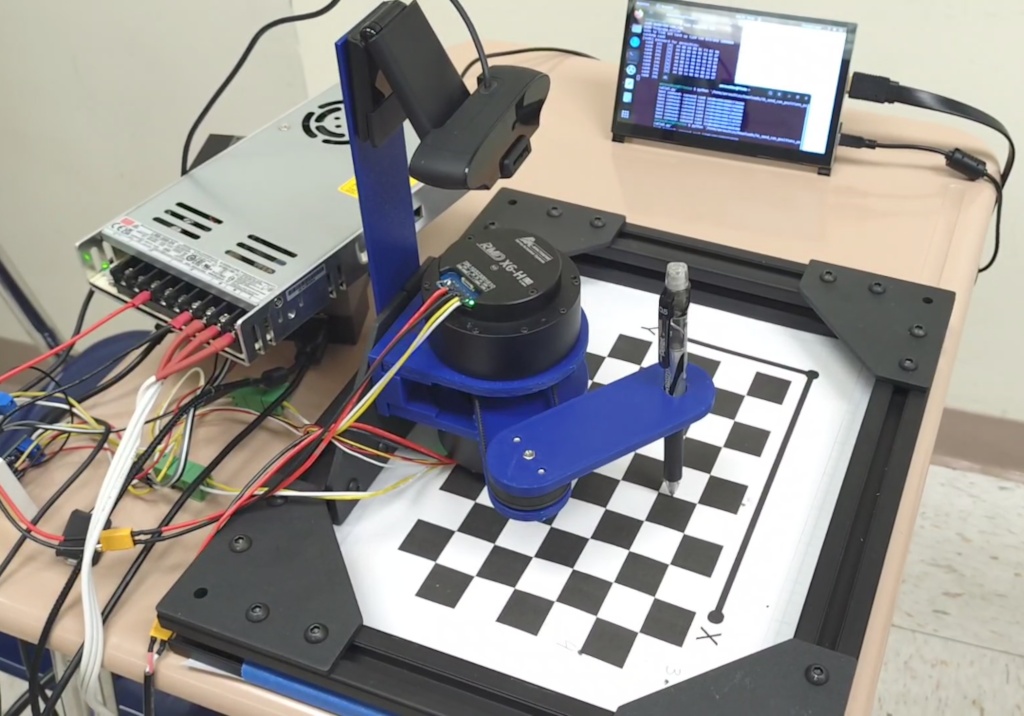
RMD-X6 Robot Arm with Jetson AGX Orin
Description
This is a robot arm which draws a line through four points on a checkerboard. It uses quasi-direct drive motors used for quadrupeds and other mobile robots and a mobile computer with AI capability, the Jetson AGX Orin. It communicates via the CAN bus and uses Inverse Kinematics to calculate the motor angle for each coordinate on the checkerboard.
Comments (0)