Moon Patroller
Description
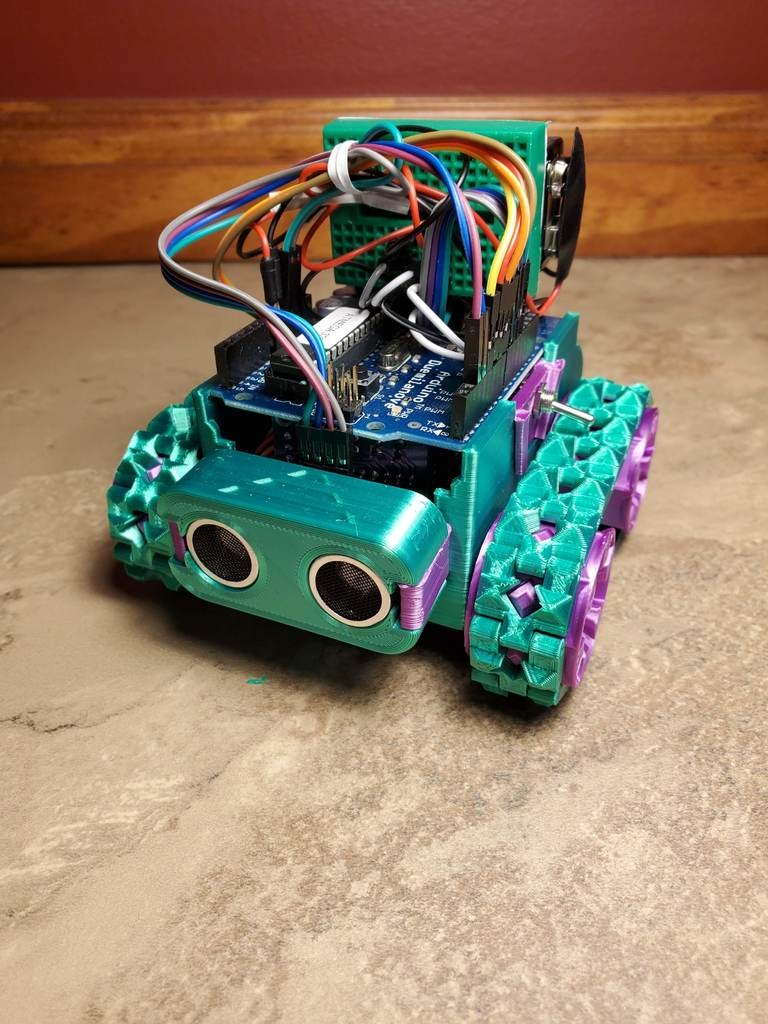
SMARS modular robot driven with 28JYB-48 steppers. When switched on it will slowly crawl forward until blocked at which point it will reverse drive the left track to turn left and then proceed forward again. Yeah it's a super simplistic program but, it does use the standard Arduino Stepper library and interrupts to handle the ultrasonic sensor.
Comments (0)