360° IR mapping Line Following Robot
Description
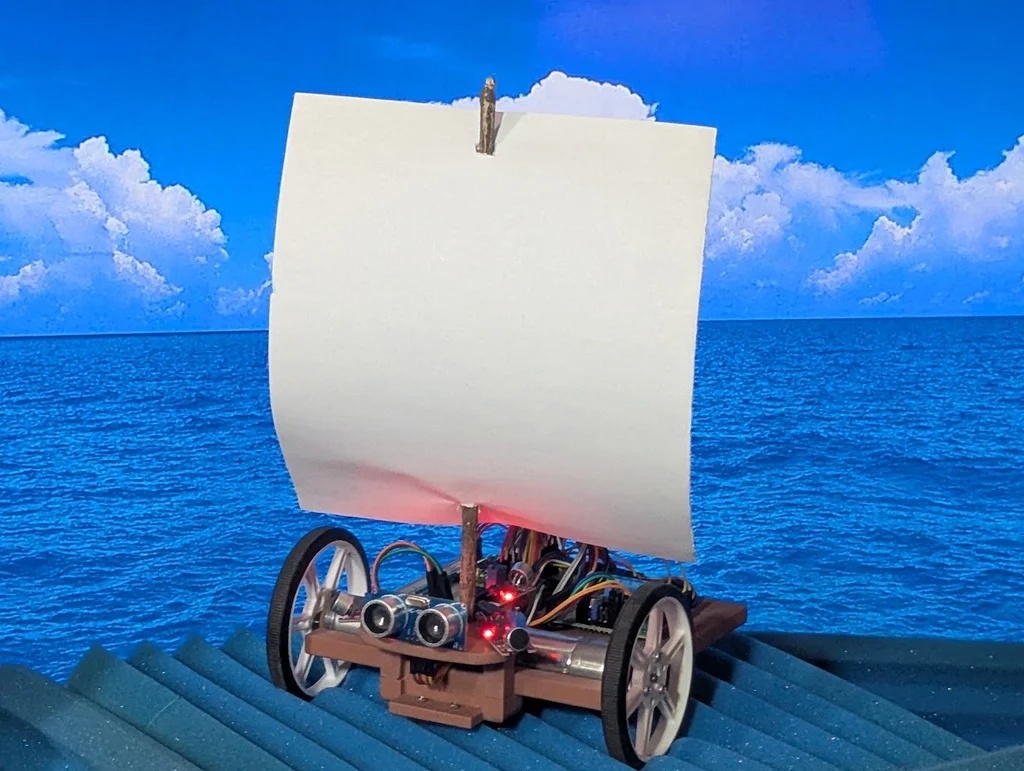
This line following robot was my final project for EEEE 485 and was required to demonstrate line following, obstacle avoidance, speed control, and a “personality trait.” My line following and speed control used DC motors and a QTR reflectance sensor from Pololu, the obstacle avoidance used a Pololu ultrasonic sensor, and my personality trait was to increase duty cycle of the motors to “steer” away from the source of any wind (noise) picked up by the array of cheap amazon audio sensors on the top platform. Additionally, I had a unique system for deciding where to turn at corners and edges that involved rotating 360° and crearting a graph of reflectance values to map out where the line continued.
Comments (0)