KL-204 Walking robot
Description
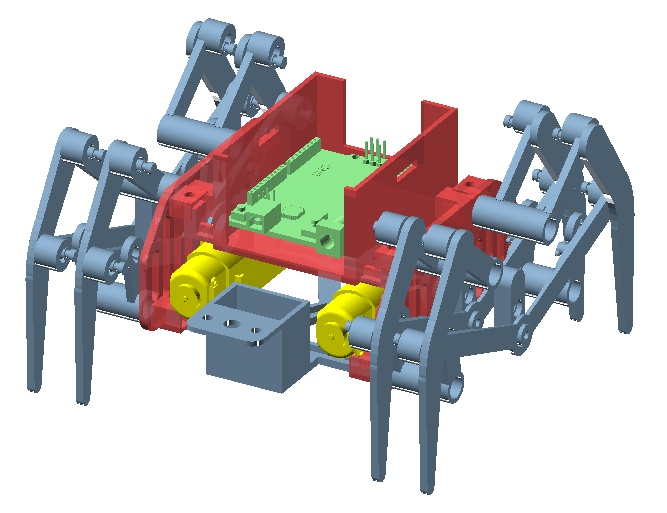
This robot based on the Klann linkage technique.This is a mechanism designed to simulate the gait of a legged animal and replace the wheel. The mechanism consists of a "leg" that comes into contact with the ground, a crank, two rocker arms, and two connecting rods, all connected together.
Comments (0)