Balance Robot (arduMega) V1
Description
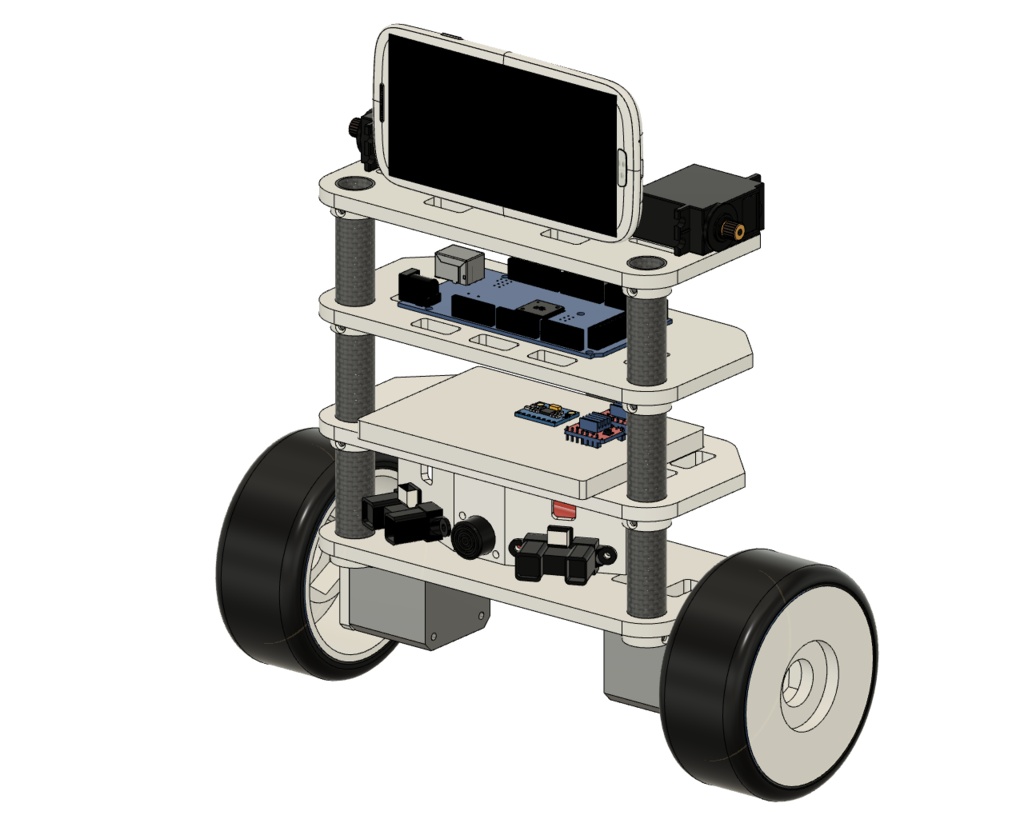
This project is a work in progress development.Hardware used:-3x 16mm carbon fiber tubes-M3 screws/hardware-Use M8x20mm bolt with wheel hub adapter (bushing is optional, designed spesific for wheels i use).-Arduino Mega-GY-521 MPU6050-Nema 17 stepper motors-A4988 Stepper drivers-Wheels: SP-Racing 1/8 Buggy Velociraptor Sport 17mm hub-Sharp IR sensors-MaxBotics sonar sensors-3x 18650 li-ion cellsmore plans-Samsung s3 for debug-Servo motors for arms.
Comments (0)