ItsyBitsy: an untethered robot that can climb
Description
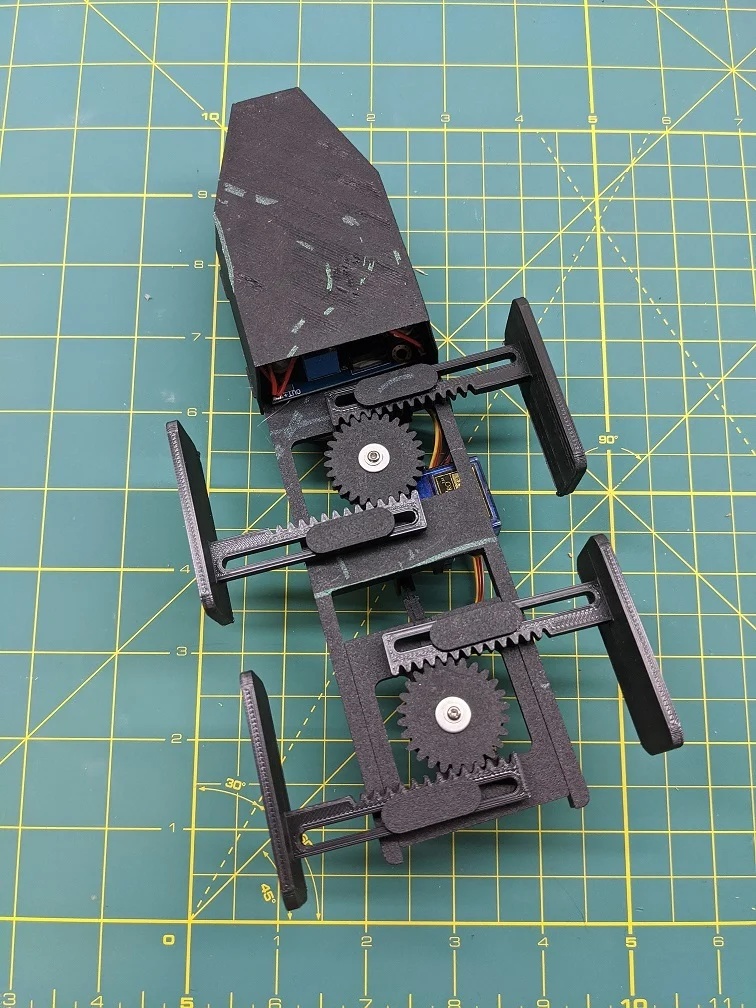
This is an untethered robot that uses involute gears and levers to propel itself along 2 parallel surfaces (~ 100mm or 4" apart). The instructable linked here shares more background on the design and build process for this project: https://www.instructables.
Comments (0)