AT-AS quadruped (or hexapod) robot
Description
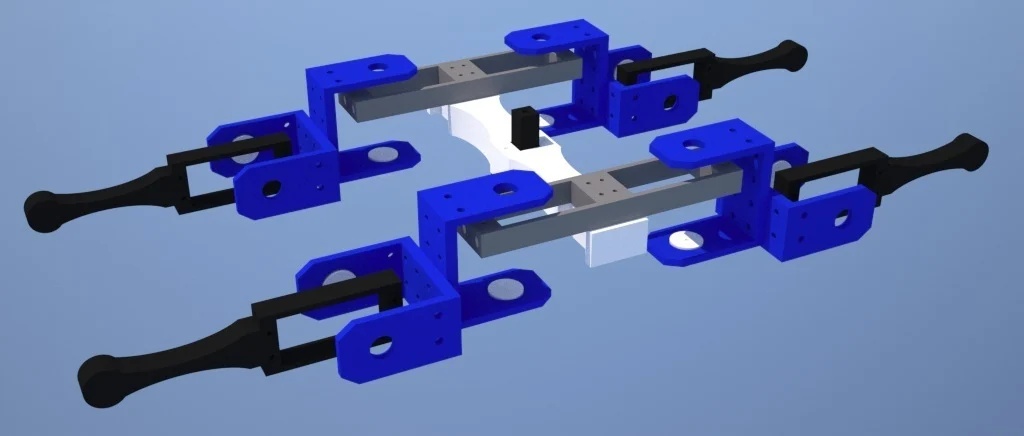
The "AT-AS" (All Terrain - Anita Scout) is a printable quadruped robot. The AT-AS is a project of an efficient robot, as it has achieved a useful and complete walking robot base using few technical and economic resources. In addition, it is a flexible robot project since its design is open to many development possibilities in future works such as the transformation of the quadruped model to a hexapod model, easy modification of leg and modular structure design, the possibility of adding sensors to improve control or communication with other robots using wireless networks via Xbee modules.
Comments (0)