Simple Delta Robot - Cheap and Easy to Build
Description
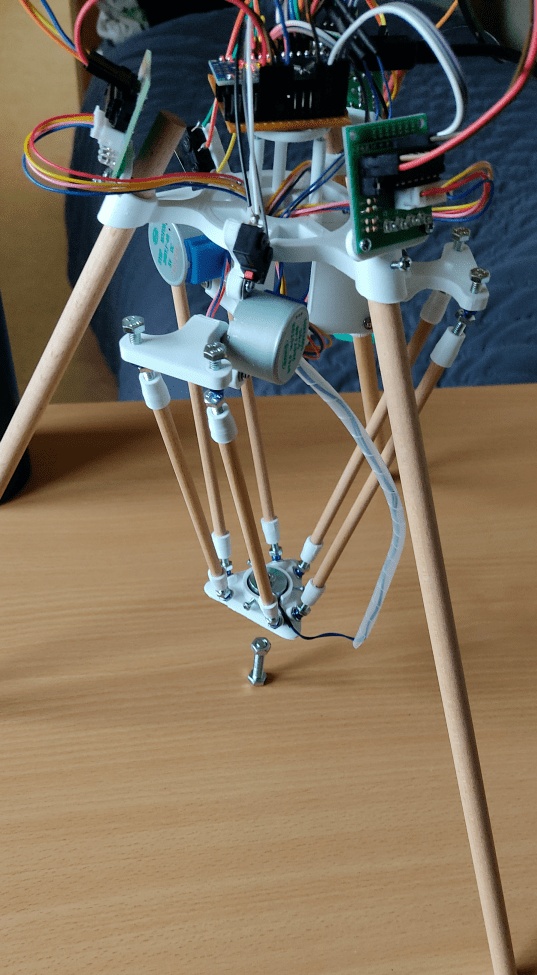
This robot is my first try at the delta structure, I designed this robot with these requirements :Use the hardware I already ownBe as small as possibleQuick to printCheck with an existing inverse kinematicsThen try to make my ownNo vision for the momentYou can use this Arduino library for the kinematics : https://github.com/tinkersprojects/Delta-Kinematics-LibraryThe parts may not be correctly oriented when imported in your slicer !There is hole in the upper body to fix a custom-made PCB but you can screw your own PCB or put your breadboard.Bill Of Material :3 stepper motors 28BYJ-48 with ULN2003 drivers3 Endstops1 Arduino Nano1 Electromagnet1 transistor NPN 2N22221m of 8mm diameter wooden doven rods2m of 3mm diameter wooden doven rods12 M2 screws and bolts12 magnet ball 5mm diameter.
Comments (0)