Leader Arm(3 axes+Hand)
Description
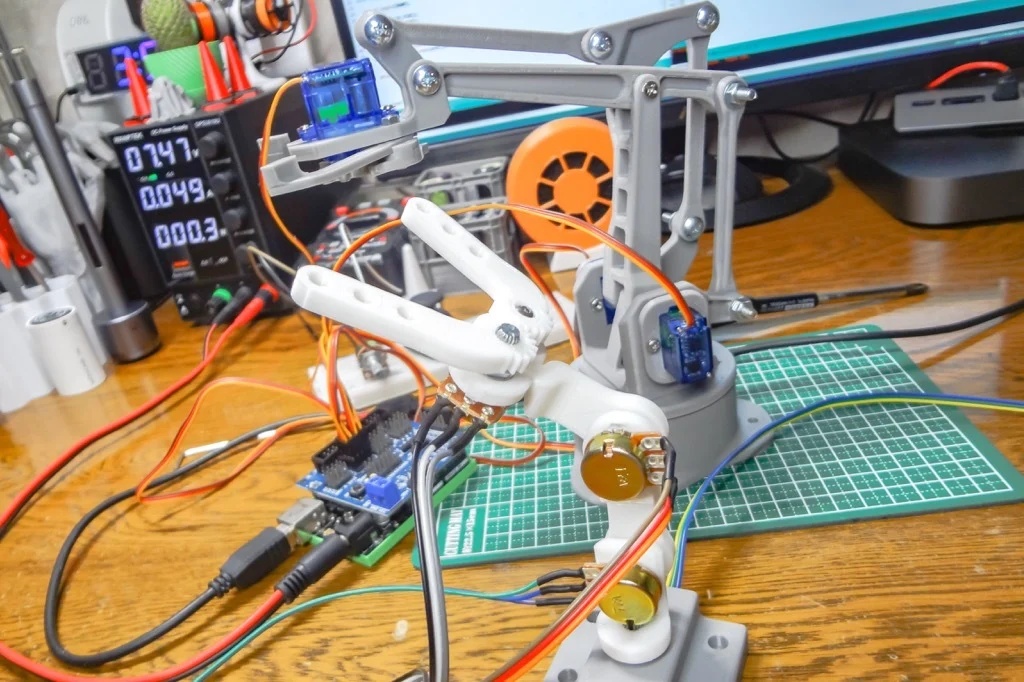
【Leader Arm(3 axes+Hand)】ロボットアームを操作するためのリーダーアーム(小アーム)となります。3軸+ハンド開閉の計4つのポテンショメーターを使いその取得したアナログ値からアームの現在のポジションを計測する事が出来ます。ArduinoやRaspberry Piなどのマイコンボードを使い、親アームに伝達し操作する用途で使用出来ます。ハンドの固定にM3×12ビスとM3ナット各1本が必要となります! 【Google Translation】It is a leader arm (small arm) for operating the robot arm.The current position of the arm can be measured from the acquired analog value using a total of 4 potentiometers with 3 axes + hand opening and closing.It can be used for the purpose of transmitting to the parent arm and operating it using a microcomputer board such as Arduino or Raspberry Pi.
Comments (0)