Cebulatron robot arm first axis - base joint
Description
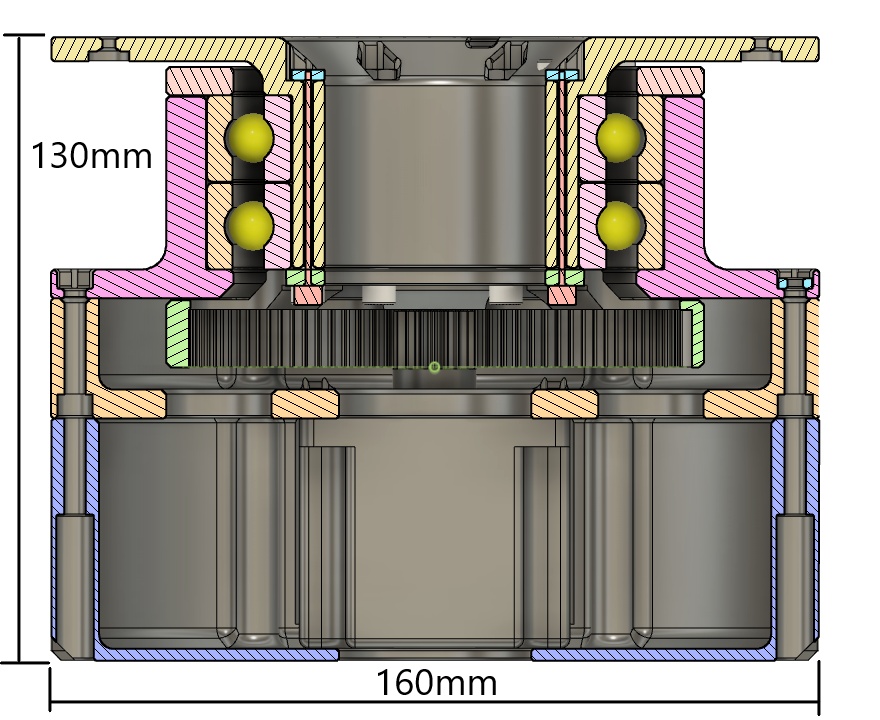
This actuator is first axis for 6-axis robot arm but it can be used as rotary table and in many other applications where you need a rotational move. To drive I used one Nema 23 stepper motor, but it is possible to use two Nema 23 and two Nema 17 or any combination depending on the needed torque. The gear ratio is 1:7 (motor gear has 15 teeth and big spur gear has 105 teeth).
Comments (0)