Cebulatron robot arm fourth axis
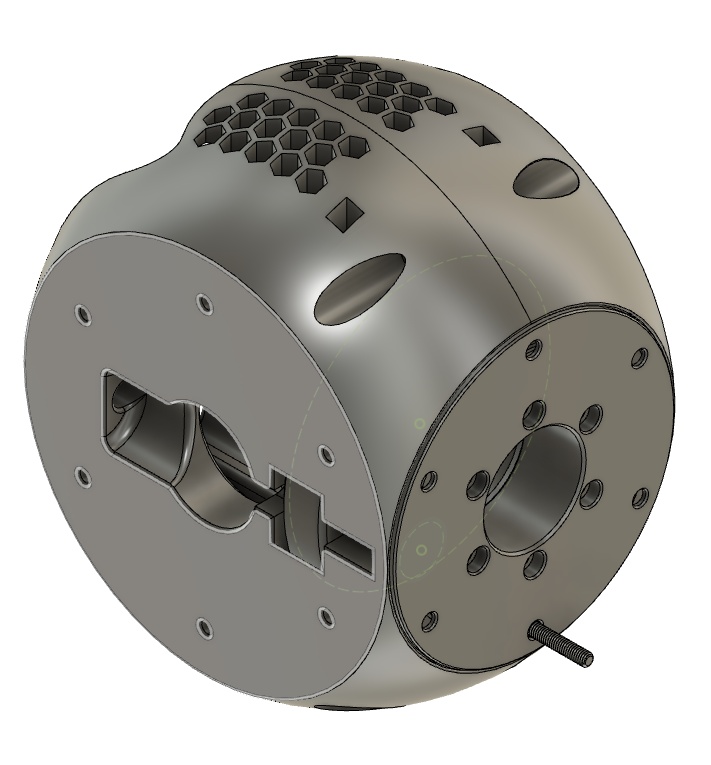
Description
This actuator is fourth axis or first wrist joint of 6-axis robot arm. To drive I used one Nema 23 stepper motor, but it is possible to use two Nema 23 however it adds mass to the robot and load 2nd and 3rd axes. The FourthAxisBodyHalfNew has compatible mounting holes with the second axis (https://www.
Comments (0)