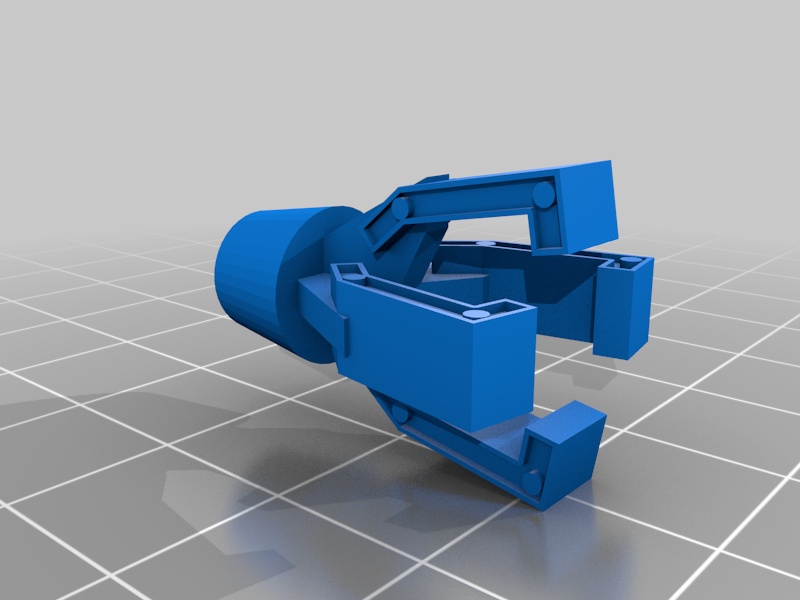
Robot Gripper 2/4 finger (static model)
Description
OpenSCAD model for a robot gripper.(static model)Finger angles may be specified as well as the number of fingers 2 or 4.Use the OpenSCAD Customizer.
Comments (0)